Classwork and activitys
Activity 1.1.1
In this activity we worked in small groups to solve problems about the mechanical advantage of various simple machines with vex materials.
In this activity we worked in small groups to solve problems about the mechanical advantage of various simple machines with vex materials.
Conclusion
No conclusion for this activity
No conclusion for this activity
Activity 1.2.3

This activity develops a basic understanding of series and parallel circuits.
1. A series circuit has one path of electrical flow while a parallel has multiple paths.
2.The voltage at the battery is the full voltage while the voltage at each bulb will be slightly less as each bulb uses electricity.
3.The current at the battery is full and flows through each component and drops slightly.
4.The voltage is similar at each bulb in parallel circuits but less than that at the battery.
5.The current is the same throughout the entire circuit.
6.The voltage at the interface will be higher than at each of the bulbs.
7.The current is similar throughout the entire circuit.
2.The voltage at the battery is the full voltage while the voltage at each bulb will be slightly less as each bulb uses electricity.
3.The current at the battery is full and flows through each component and drops slightly.
4.The voltage is similar at each bulb in parallel circuits but less than that at the battery.
5.The current is the same throughout the entire circuit.
6.The voltage at the interface will be higher than at each of the bulbs.
7.The current is similar throughout the entire circuit.
Activity 2.1.1
This activity is the first introduction to calculating Yi ,Ai , centroids, using the additive and subtractive methods.
1. It allows them to pick up an object so it wont fall and easily be moved from point A to point B.
2. Rectangular provides more weight, While i beams provide as much support with less weight.
1. It allows them to pick up an object so it wont fall and easily be moved from point A to point B.
2. Rectangular provides more weight, While i beams provide as much support with less weight.
Activity 2.1.2

This activity uses basic statics and centroids equations in an applied sense.
1.The higher the moment of inertia of an item the lower the beam deflection.
2. Decrease the modules of elasticity.
1.The higher the moment of inertia of an item the lower the beam deflection.
2. Decrease the modules of elasticity.
Activity 3.1.1
Robots are similar to humans if you consider that both use inputs and outputs to sense and react to the world. Most humans use five senses to perceive the world. Based on the input of these senses, your brain makes decisions to activate a response. Through muscle activation, the response can take many forms, including speaking, moving your hand, or running. Robots behave similarly when the world is sensed through physical touch, ambient light intensity, or distance to a solid object. The robot processor translates these inputs and activates a response by triggering a motor or light emitter. In this activity you will use the ROBOTC software to monitor inputs and control outputs. This will allow you to test the behavior of components before writing a program and to use it as a troubleshooting tool for analyzing program performance.
1. Describe how these motors and sensors may be used.
They can rotate in diffrent directions a varying speeds from very fast to very slow
2. Describe scenarios where the motors or sensors did not respond as you would predict.
Giving the motors very low inputs of numbers like 10
1. Describe how these motors and sensors may be used.
They can rotate in diffrent directions a varying speeds from very fast to very slow
2. Describe scenarios where the motors or sensors did not respond as you would predict.
Giving the motors very low inputs of numbers like 10
Activity 3.1.2
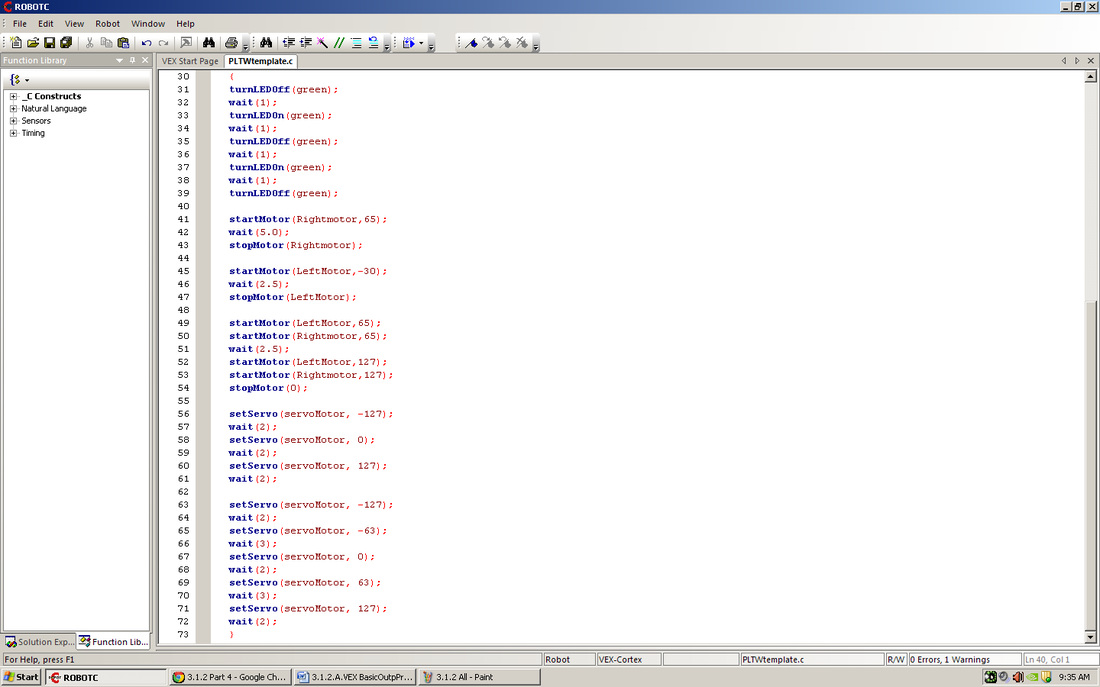
1. Our group had trouble remembering to place semicolons and remembering to match parenthesis to be even.
2.A flashlight is an example of an output it puts out light when the sensor tells it to turn on
2.A flashlight is an example of an output it puts out light when the sensor tells it to turn on
Activity 3.1.3
Inputs are devices which provide a processor with environmental information to make decisions. These devices have the capacity to sense the environment in a variety of ways such as physical touch, rotation, and light. An engineer can design a system to respond to its environment through the use of input sensors. In this activity you will use ROBOTC and VEX robotics platform components to sense the environment.
1. One problem our group had was putting our brackets in the right place to stop the code making it very hard to compile and download.
2. Sensors are used in volume nobs, security systems, and computers.
2. Sensors are used in volume nobs, security systems, and computers.
Activity 3.1.4
One of the powerful attributes of a computer program is its ability to make decisions. Although it can be argued that only humans are capable of decision making, computers are able to make decisions using criteria. They are able to compare two values and determine whether one is larger than the other. They can determine whether a statement is true or false, based on empirical data.
1. One big problem we had was the general purpose or idea of what the code was supposed to do and applying it to the actual code.
2.While loops can be used in If Elese statments which cause something to work when all elese fails
2.While loops can be used in If Elese statments which cause something to work when all elese fails
Activity 3.1.5
A program can accomplish a given task in any number of ways. Programs can quickly grow to an unmanageable size so variables and functions provide a technique to reduce the size of the program. A variable is a space in your robot’s memory where you can store data, such as whole numbers, decimal numbers, and words. Functions group together several lines of code, which can then be referenced many times in task main, or even other functions. The use of variables and functions allows for complex control of a system.
1. We had little trouble with this project other than expected frustrations.
2.Varibles are used in code so that input can produce the proper outputs in a program
2.Varibles are used in code so that input can produce the proper outputs in a program
Activity 3.1.6
Many devices function without ever knowing whether they are doing the job that they were programmed to do. They might run for a specific amount of time or perform one function and then stop. For example if you set the clothes dryer to run for 45 minutes, your clothes might be dry or they might not be dry. A clothes dryer is an open loop system because the process provides no feedback to the device. Newer clothes dryerspossess moisture sensors. The moisture sensors inform the machine when the clothes are dry, at which point the dryer can stop running. The feedback provided by the sensor makes this a closed loop system.
1. an open loop system is a system that has yet to be used. Similar to a stove top if the switch is on that the stove is hot when the switch is off there is no diffrence.
2.a closed loop system is a system that is yet to be used like a tazer it holds a charge until it lets it all go with one discharge
2.a closed loop system is a system that is yet to be used like a tazer it holds a charge until it lets it all go with one discharge
